Programmer's Calculator
Finished look

Finished look
A new peripheral for the calculator - a passive buzzer.
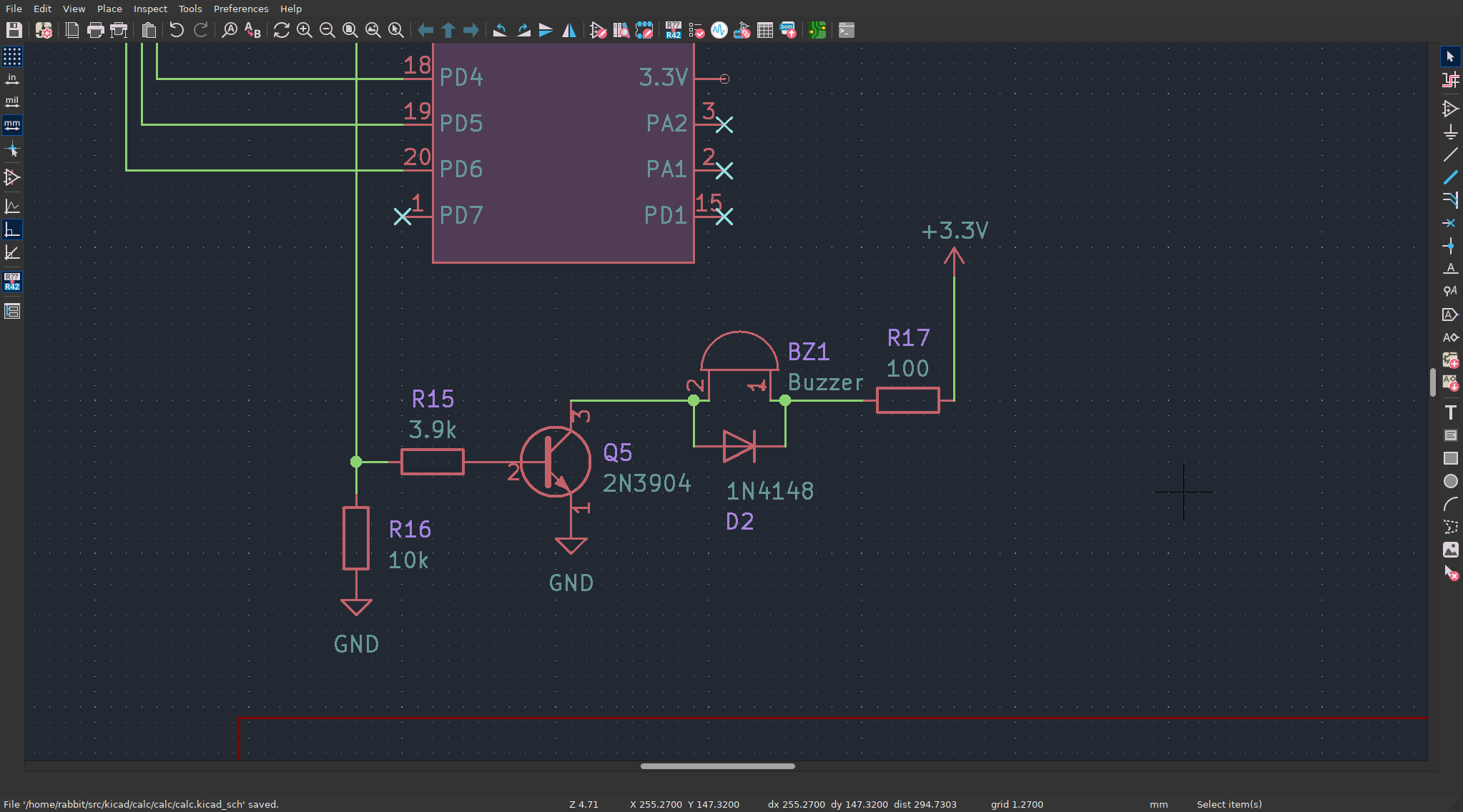
A passive buzzer with a coil resistance of 16 from an Arduino kit is used. Here’s how it looks with a soldered diode. The diode is necessary because this is an electromagnetic buzzer, not a …
This is a very simple thing - a desktop calculator for operations in different number systems.
It is imagined as having a few lines of display, a lithium battery, and a keyboard with a small number of keys.
I will use Rue Mohr's scanless keyboard design http://ruemohr.org/~ircjunk …
After calculation, I proceed to the manufacture of antenna parts. Special care is needed when bending the antenna wire itself and making the balun.
I never doubted for a second that I couldn't just take and bend the wire in compliance with all radii and distances, so …
Current reading: SINR/RSRP: 20 dB / -95 dBm. Do I need an antenna? Not sure. Would it be fun to make an antenna? Certainly! So let's get started:)
First, I want to make sure that openEMS (the modeling system I plan to use) is calculating correctly. Let's take …
How to program an FPGA to work with such simple input / output devices as a rotation angle sensor and LED indicator.
When I studied FPGA in the begining, I really wanted to have some kind of visible response to my program. The built-in RGB LED became old quickly, in particular …
On the one hand, the adapter accepts keystrokes from the standard PS / 2 keyboard, and on the other hand, manipulates the input lines of the 1801VP1-014 chip by pretending to be a matrix of keys. The number of AtMega8 outputs is increased using a shift register. The firmware is written …